Vibration Control: An Overview and Checklist
By Eric E. Ungar
Acentech, Inc., Cambridge, MA
Motivation
Although professionals in the noise and vibration control area certainly are familiar with what vibration control involves, we often focus on the facets we know best and thus may miss some useful alternatives. For this reason it may be useful to revisit the big picture, the fundamentals, and the range of potential vibration control approaches.
It is important to keep in mind that the basic purpose of vibration control is not the reduction of vibrations per se, but the reduction of the unwanted effects of vibrations. This mind-set enables one to consider a broader range of vibration control options than those typically addressed in textbooks and handbooks.
The Classical Model
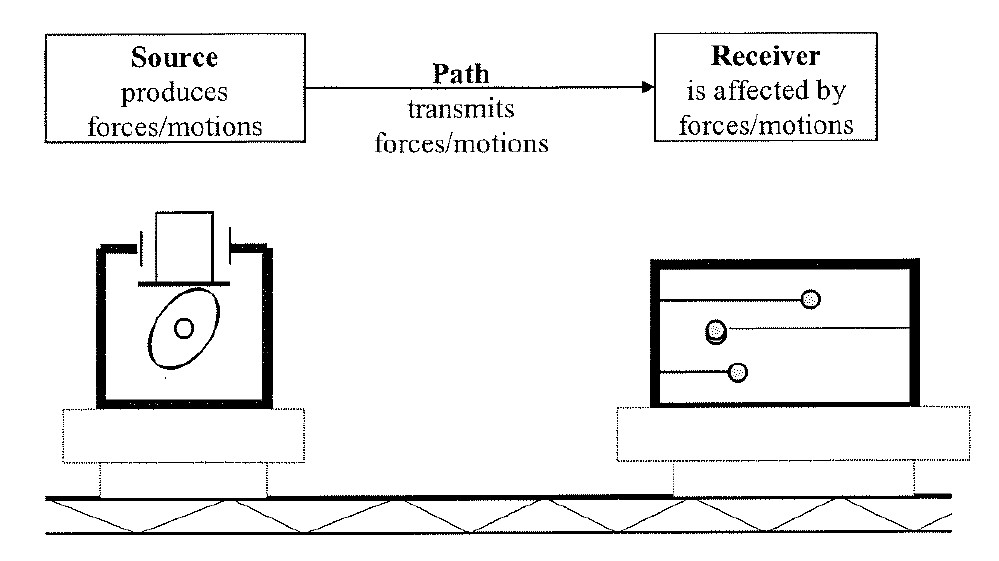
It is useful to begin with the well-known source-path-receiver concept, as shown diagrammatically in the schematic figure below (fig. 1). The source—the item that causes vibration—here is illustrated as a cam-driven piston; the receiver—the item that is sensitive to vibration—is shown as a box that supports several cantilevers with masses at their ends, representing elements with different natural frequencies; the transmission path between the two is sketched as a narrow truss structure.
This simple model points to conception of the various vibration control means in terms of the five categories addressed in the next section and facilitates consideration of the associated wide variety of vibration control approaches.
An Outline of Vibration Control Means
A. Vibration control at the source (modification of the forces produced by the source)
- Changing to an alternative system (e.g., by replacement of a reciprocating machine that generates inertia forces along a linear axis with a rotating machine that generates small rotating inertia forces).
- Changing the orientation of the source so that the forces it generates do not act in the direction in which the path structure accepts and/or transmits motion most readily (e.g., by orienting the forces parallel, rather than perpendicular, to a plate structure).
- Reduction of the motions and forces generated by the source (e.g., by dynamic balancing, modification of cam profiles, reduction of reciprocating masses).
- Addition of dynamic absorbers to the source to reduce its motions at selected frequencies.
- Detuning (changing the operation or the design of the source so that it does not generate vibrations at frequencies at which the path transmits vibrations well and/or at frequencies at which the receiver is sensitive).
B. Reduction of the forces transmitted from the source to the path structure
- Adding inertia to the source (e.g., in the form of an inertia base).
- Introducing a resilient connection (isolator) between source and path.
- Adding an active control system between source and path.
- Reducing the path’s acceptance of vibrations at the source attachment (e.g., by adding mass, damping, vibration absorbers to the path structure at, or near, the source attachment).
C. Reduction of transmission along the path
- Blocking energy propagation along the structure by adding impedance discontinuities (e.g., cuts or other changes in structural section properties, resilient elements, blocking masses, dynamic absorbers, mechanical filters, active control systems).
- Enhancing energy dissipation (e.g., by adding damping treatments, localized dynamic absorbers, side paths to divert energy away from the receiver).
- Detuning (modifying the path so that it does not transmit vibrations well at significant frequencies generated by the source and/or at frequencies at which the receiver is sensitive).
D. Reduction of transmission from path to receiver
- Reduction of motion of path structure at receiver location (e.g., by adding mass, stiffness, dynamic absorbers to the path structure).
- Insertion of resilient elements or active isolation systems between the path and the receiver.
- Adding mass (e.g., an inertia base) or dynamic absorbers to the receiver.
E. Reduction of adverse effects on receiver
- Changing to a less sensitive alternative receiver.
- Reorienting the receiver relative to the path to reduce its reception of path vibrations in its more sensitive directions.
- Modifying receiver design (e.g., by exchanging components to less sensitive ones, ruggedizing the assembly, adding internal isolation, damping, dynamic absorbers).
- Detuning the receiver (modifying the receiver so that it is not sensitive at frequencies at which the source produces significant vibration and/or the path readily transmits vibrations).
Concluding Remarks
Obviously, real-world situations generally are more complicated than that represented by the simple classical schematic model. Several sources may be of concern. The behavior of any single source may be complex, giving rise to considerable forces acting in many directions and at many frequencies. A multitude of receivers with many sensitivities may be present as well as several significant transmission paths. Additionally, there tend to be practical (and financial) limits on what vibration control means can be implemented in a given case.
Nevertheless, the basic source-path-receiver view provides a valuable starting point for guiding one’s thinking in practical situations, facilitating one’s consideration of the variety of potentially useful vibration control approaches and means.