NEMO: Noise Monitoring of Individual Road and Rail Vehicles—The Challenges
By Gijsjan van Blokland (M+P), Bert Peeters (M+P), Irune Indacoechea Vega (University of Cantabria), Maximilian Ertsey (Müller-BBM), Truls Berge (SINTEF), Stefan Lutzenberger (Müller-BBM Rail), Peter Liljenberg (GATE21), and Sonia Alves (Müller-BBM)

Introduction
Harmful effects arising from the transport sector are some of the most worrisome problems in Europe. Transport produces almost a quarter of Europe’s greenhouse gas emissions and is the main cause of noise and air pollution in cities. Long-term exposure to noise and pollution may cause direct health problems, such as sleep disturbance, stress, asthma, high blood pressure, and cardiac disease. According to the European Environment Agency (EEA), noise is associated with more than 12,000 premature deaths every year. Hence, there is a need to design and manage transport and mobility in a smarter way.
New noisy vehicles can be partly controlled through a program of type approval of new vehicles for both road and rail. However, existing vehicles may be of an older type and may not be subject to stricter modern noise requirements; they may suffer from low maintenance, such as leaking exhausts; or they may have been tampered with. Rail vehicles with a life expectancy of over 40 years—especially those vehicles not subjected to the recently introduced type approval—are one cause of excessive noise.
What Is NEMO?
Horizon 2020, the European Union’s (EU) research and innovation programme, is funding an initiative by a consortium of 18 partners from 11 different EU-member states to develop a uniquely European system for remote sensing of the noise and gaseous emission of road and rail vehicles in real traffic. Such technologies can be applied to enforce low-emission zones in cities and to detect manipulation with silencing and air cleaning systems.
In addition, innovative infrastructure-based solutions will be developed to reduce the noise levels and improve air quality along urban and peri-urban roads.
Our project is titled Noise and Emissions Monitoring and Radical (NEMO), and it has received funding from the EU’s Horizon 2020 research and innovation programme under grant agreement No. 860441.
This article will discuss NEMO’s work on remote sensing technologies for road and rail vehicle noise emission and the infrastructure related measures to reduce road traffic noise.
Noise Emission of Road Vehicles
There are many challenges in the process of detecting noise emissions of road vehicles. One of the first steps is to find a consensual definition of a “noisy vehicle.” Generally, a noisy vehicle can be characterized by one or both of the following conditions:
- A vehicle in a poor or modified condition.
This can be related to exhaust malfunction, use of an illegal silencer with no sound absorption, the rattling sound from goods on a trailer, chains, and so on. It may cause a sound level way above the certified type-approval level or the average vehicle noise levels. The vehicle owner has the prime responsibility. - A vehicle driven in a noisy way.
Typically, high acceleration, high engine speed, and/or low gears cause more vehicle noise. In all cases, the driver is responsible for causing these conditions.
Noisy vehicles can be referred to as “high emitters.” A vehicle that has been type approved, is well maintained, and is driven under normal conditions is never a high-emitter vehicle, even if it is subjectively perceived as annoying.
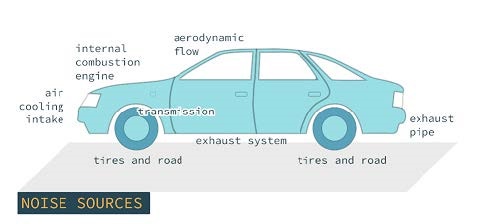
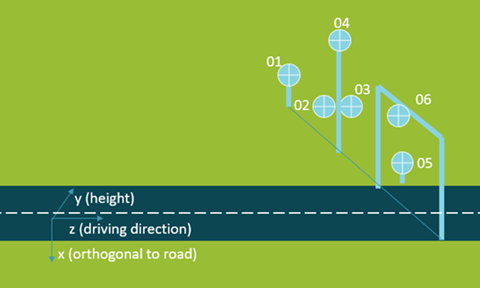
To detect a high-emitter vehicle, it is important to distinguish between the different noise sources from one single vehicle (see fig. 1). The propulsion and exhaust noises will be the most relevant parameters to classify a vehicle as a high emitter, whereas tire-road noise and aerodynamic noises, if occurring, can be treated as unwanted background noise. So, in summary, a passing vehicle, depending on the driving conditions (high speed, high engine speed, or high engine load), can be noisy while fully complying with the type-approval regulations for that type.
Figure 2 shows the variation in noise levels that can be attributed to the variations in driving conditions.
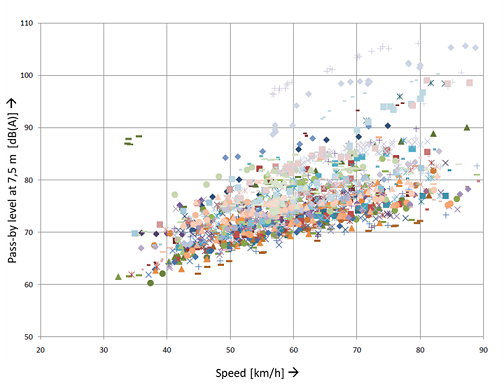
Thus, the conclusion that a vehicle is complying with the regulations cannot be exclusively evaluated based on the pass-by levels. To justify such conclusion, a Noise Remote Sensing Device (N-RSD) is able to normalize the measured sound levels from a single event to the sound level that the vehicle will produce under type-approval conditions. (See below for more on type-approval testing.)
A perfect match between real-life traffic noise measurements and type-approval conditions will not be possible. One reason is that type approval is based on multiple measurements of a single vehicle under different driving conditions, while the N-RSD will need to work with a single pass-by and uncontrolled driving conditions. Other deviations from the type-approval test include the road surface, weather conditions, background noise, and microphone position.
The measurement inputs to the N-RSD are the location of the vehicle, the identification of the engine speed and load, the estimation of the single-event noise level, and the normalization of the measuring site.
Type Approval of Road Vehicles
All common vehicles registered in EU member countries must comply with technical specifications concerning safety, exhaust emission, lighting, and so on. These specifications are uniform over the EU‑27 and enable free trade between EU countries; a member state cannot force additional requirements. To facilitate trade in and outside the EU, technical specifications are harmonized under the umbrella of United Nations Economic Commission of Europe in Geneva. These specifications include a maximum permissible noise emission of the vehicle. A minimum level is also defined for safety considerations, for example, to protect visually impaired pedestrians.
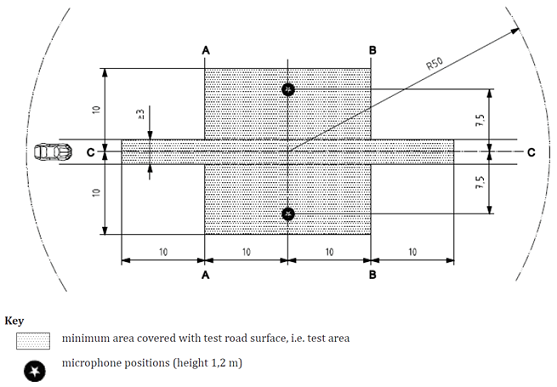
The maximum emission is measured in a drive-by test, under precisely defined conditions of vehicle speed and vehicle acceleration. For passenger cars, the vehicle speed at the microphone positions (see fig. 3) shall be 50 km/h. The required acceleration is composed of a weighted average of wide-open throttle (WOT) pass-by and constant speed cruise-by tests, with different gear ratios. This weighted average is assumed to represent the average maximum acceleration for that vehicle type in urban conditions. For vehicles with high power-to-mass ratios, the target acceleration will be higher than for medium or low-powered vehicles.
The maximum allowed level for passenger cars under these test conditions was lowered from 82 dB at the introduction of this system to the current 72 dB. Not all reductions were technical; some lowering of levels was caused by changes in the test procedure. For heavy vehicles, a different test procedure is designed, with relatively high engine speed and vehicle load but at a lower vehicle speed of 35 km/h. Maximum noise levels were lowered over time from 92 to 80 dB, but recently an increase to 84 dB was introduced to compensate for a change in test procedure.
Engine Speed
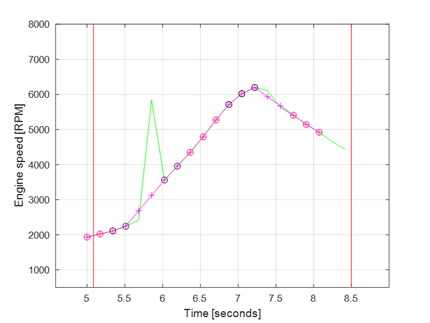
As a first attempt to measure the engine speed (rpm) of a passing vehicle, an algorithm based on a FFT analysis of the sound signal has been developed by SINTEF. This algorithm has been tested on 7 accelerating vehicles (controlled pass-by), including one motorcycle with modified exhaust system (fig. 4).

Figure 5 shows an example of estimation of the engine speed for a passenger car with petrol engine, with high acceleration over 30 m.
The first results show that the algorithm works when the vehicles are driven with a high engine speed, as is the case for high accelerating vehicles. The work will continue to validate the system with different types of vehicles and to different driving conditions and locations.
Classification Model
The data measured by the N-RSD system are fed into a classification model. The classification model will correct the measured maximum noise level for these differences as much as possible. Input for the model, besides the noise measurement, will be the vehicle speed, acceleration, and engine speed. Using these values, the noise level will need to be normalized toward reference conditions equal or close to the type-approval test. Technical information about the vehicle and engine, such as the power-to-mass ratio, will be obtained from the license plate. Besides the total noise level, the spectral characteristics are important: separation between rolling noise and propulsion noise will partially be done by regarding especially the lower frequency range, or by identifying tonal components. These data will be collected in a database to find the required relations between all parameters and to compare each vehicle to a specific threshold, under reference conditions.
The advantage of using an unsupervised monitoring system is the large amount of data that will be available after a certain measurement period. This allows for machine learning techniques to be applied and to tune the model to specific vehicle categories, engine types, vehicle age, and so on. As more data come in, the model will become better trained and more accurate. At first, the model will not be able to correct for all parameters, and the precision will be lower: it will be able to identify only exceptionally high emitters, which may already be helpful in tackling annoyance. As the model is better trained with more data, it will be more specific toward vehicle properties and driving conditions and be able to identify more vehicles that are too loud.
Challenges
In summary, the main challenges addressed within the noise emission work package will be
- the development of a horizontal array to separate the emission from one individual vehicle;
- continuous speed monitoring to measure the momentary speed as well as the acceleration (acceleration combined with engine speed and vehicle mass defines the engine load);
- the determination of the engine firing frequency from narrow band spectral analysis (combined with the number of this gives the engine speed—when combined with the vehicle speed, the gear ratio is to be found);
- the development of a model that normalizes the noise level to reference driving conditions and then classifies each vehicle as low, medium, or high emitter given its technical details.
At the moment, two configurations of traffic stream and microphone locations are studied. One configuration is beside the road at the standardized position of 7.5 m from the center of the drive lane (see fig. 6). The other consists of the microphone array on a portal above the road. The latter has several advantages: First, it can also be applied with multilane roads; second, an offset by the passing vehicle from the center of the lane has a minor effect on the distance from the source to the microphone; and third, the body will shield part of the rolling noise. This configuration also harmonizes with the configuration that will be developed in the NEMO part for monitoring the gaseous emission of road vehicles.
Noise Emission of Rail Vehicles
The noise issues from rail traffic are dominated by freight transport. First, since freight wagons are often equipped with cast iron block brakes that corrugate the rolling surface of the wheel and thus cause excessive rolling noise compared with the more silent disc brakes used on passenger vehicles. Second, on crowded rail lines, freight traffic is scheduled in the night to avoid disturbing the timetable for passenger connections.
New rail vehicles designed for cross-border operations in the EU-27, such as freight wagons and high-speed trains, have to comply with technical requirements: the Technical Specifications for Interoperability (TSI). The sound emission is regulated in the TSI-noise. Maximum levels are defined for wagons and trains at a speed of 80 km/h, based on the number of axles and length. The specified limit values rule out the applications of cast iron brake blocks. Additionally, limits are set for self-propelling vehicles for stationary noise emission, sound levels during acceleration from standstill and the sound levels in the drivers’ cabin.
Freight wagons can be silenced significantly by replacing the conventional cast iron blocks with brake blocks made of composite materials, such as the LL or K types. To stimulate the application of these slightly more expensive materials, railway operators apply a track access charge that depends on the rolling noise level (or actual on the type and material of the brake system).
In 2020, Switzerland has started to ban wagons with cast iron brakes; in Germany the ban will start on December 13, 2020. From that time, wagons equipped with noisy brakes will not be allowed to be operated in both countries. In the frame of the TSI-Noise, only wagons compliant with the TSI-Noise are allowed to operate on quieter routes from December 8, 2024, in the EU. The enforcement, however, has practical restrictions regarding the enforcement of the law.
Until now it has only been possible to enforce the rolling noise levels for a total train. If a train is composed of a mix of wagons and possibly a mix of brake systems, no monitoring is possible on the level of individual wagons. The line operator has to rely on the declaration of the operator of the train. Since the wagons in a freight train often originate from different wagon owners, mistakes are often made, and enforcement is nearly impossible. Enforcement currently requires a manual check of the documents of each wagon. Monitoring, however, may support this task.
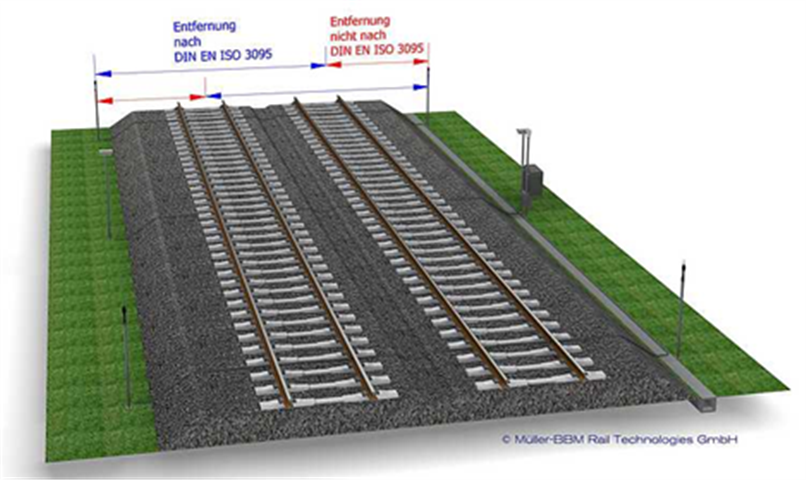
It is the objective of the NEMO part on rail vehicles to determine rolling noise levels of individual wagons in a freight train and to identify the wagon based on its unique identification code (UIC). Such will greatly improve the reliability of the NDTAC system and stimulate the further application of low noise technology (see fig. 7).
Challenges to Measuring and Identifying Train Noise
The two major challenges that have to be addressed in measuring and identifying train noise are as follows:
- The measurement of the emission of an individual freight wagon in a train.
A train can be seen as a series of wagons, each wagon with a series of two or more bogies, each emitting a specific noise level. First, all individual bogie emissions must be assessed, and the wagons must be identified. Next, the noise emission of all bogies belonging to the same wagons must be combined into a wagon emission. Additionally, the parameter “number of axles/length” has to be determined, since with higher axle densities, higher emission is allowed in the TSI. - The identification of the wagon.
To attribute the sound emission to a specific wagon, its UIC must be known. At the moment, not many wagons are equipped with a RFID that can be read out. If that is not the case, the code written at the side shall be determined using optical technologies. NEMO intends to use industrial high-speed cameras and artificial intelligence to identify the wagon number.
A version of such a system is at the moment running on several spots along major German rail lines (see https://www.laerm-monitoring.de/). This is the basis for the NEMO system. NEMO will expand the system performance to contribute to quieter rail traffic in Europe.
Infrastructure Measures for Noise
In addition to the already indicated noise and air pollution caused by road traffic, the wear and tear from tires has found to significantly contribute to the flow of microplastics into the environment. In fact, according to the Swedish Environmental Agency, the most important emissions of microplastics in Sweden are road wear and abrasion of tires, with about 13,000 tons released every year. Although the fate of this pollutant is uncertain, there are estimations indicating a relative contribution of 5–15 percent to the total amount of plastics ending up in the oceans.
Therefore, noise, exhaust emissions, and microplastics are increasing concerns that need to be urgently addressed to reduce the impact on human health and the environment. In this sense, it is generally acknowledged that the type of road surface determines for a large part the sound emissions of the passing vehicles. In particular, porous surface types present noise-absorbing capabilities, which have been demonstrated to have a reduction potential for both light and heavy vehicles compared to a conventional smooth dense surface. Along the same line, porous asphalt mixtures are expected to contribute to reducing microplastics release to the environment by harvesting a considerable amount of them within their pore network.
Thus, to help mitigate the most worrying emissions generated within the road environment, the NEMO work package will develop two types of road surfaces: one specifically designed for urban traffic and one for peri-urban/rural roads. These surfaces will exhibit capabilities for noise suppression and, in the case of peri-urban roads, microparticle harvesting will be especially pursued. To take advantage of the higher surface area provided by the porous network, the extension of the environmental efficiency of the road surfaces with NOx reducing capabilities will also be carried out.
Challenges to Optimizing Pavements
The NEMO work package on infrastructure faces the following challenges with regard to optimizing pavements with enhanced environmental efficiency for noise, microparticles, and reduction of exhaust emissions:
- To develop an effective noise-reducing surface that is durable under urban traffic conditions and that combines effective photocatalytic materials to improve air quality in high emission zones.
- To develop a road surface for peri-urban application that not only exhibits effective noise reduction but also has positive effects on the pollution with microplastics from the wear of tires, including the collection and measurement of retained particles.
- To develop a noise-reducing road surface by optimizing texture and voids content and at the same time limiting the increase of rolling resistance.
Read More
The NEMO project results are available on the website: https://nemo-cities.eu/.